lunes, 28 de septiembre de 2015
|
martes, 15 de septiembre de 2015
Redes neunorales
.
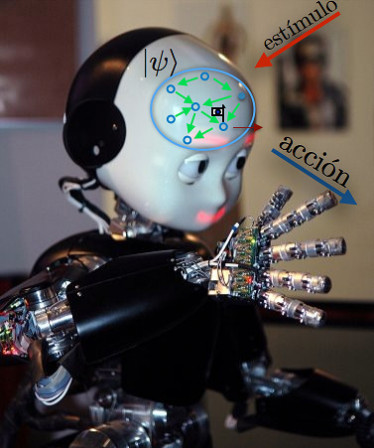
Red neuronal artificial
Las redes de neuronas artificiales (denominadas habitualmente como RNA o en inglés como: "ANN"1 ) son un paradigma de aprendizaje y procesamiento automático inspirado en la forma en que funciona el sistema nervioso de los animales. Se trata de un sistema de interconexión de neuronas que colaboran entre sí para producir un estímulo de salida. En inteligencia artificial es frecuente referirse a ellas como redes de neuronas o redes neuronales.

.
Historia de la robótica
Historia de la robótica
La historia de la robótica va unida a la construcción de "artefactos", que trataban de materializar el deseo humano de crear seres a su semejanza y que lo descargasen del trabajo. El ingeniero español Leonardo Torres Quevedo (GAP) (que construyó el primer mando a distancia para su automóvil mediante telegrafía sin hilo,[cita requerida] el ajedrecista automático, el primer transbordador aéreo y otros muchos ingenios) acuñó el término "automática" en relación con la teoría de la automatización de tareas tradicionalmente asociadas.
Karel Čapek, un escritor checo, acuñó en 1921 el término "Robot" en su obra dramática Rossum's Universal Robots / R.U.R., a partir de la palabra checa robota, que significa servidumbre o trabajo forzado. El término robótica es acuñado por Isaac Asimov, definiendo a la ciencia que estudia a los robots. Asimov creó también las Tres Leyes de la Robótica. En la ciencia ficción el hombre ha imaginado a los robots visitando nuevos mundos, haciéndose con el poder, o simplemente aliviando de las labores caseras.

martes, 8 de septiembre de 2015
Inteligencia Artificial
La inteligencia artificial (IA) es un área multidisciplinaria, que a través de ciencias como las ciencias de la computación, la matemática, la lógica y la filosofía, estudia la creación y diseño de sistemas capaces de resolver problemas cotidianos por sí mismas utilizando como paradigma la inteligencia humana.[cita requerida]
General y amplio como eso, reúne a amplios campos, los cuales tienen en común la creación de máquinas capaces de pensar. En ciencias de la computación se denomina inteligencia artificial a la capacidad de razonar de un agente no vivo.1 2 3 John McCarthy acuñó la expresión «inteligencia artificial» en 1956, y la definió así: “Es la ciencia e ingenio de hacer máquinas inteligentes, especialmente programas de cómputo inteligentes”.4
- Búsqueda del estado requerido en el conjunto de los estados producidos por las acciones posibles.
- Algoritmos genéticos (análogo al proceso de evolución de las cadenas de ADN).
- Redes neuronales artificiales (análogo al funcionamiento físico del cerebro de animales y humanos).
- Razonamiento mediante una lógica formal análogo al pensamiento abstracto humano.
También existen distintos tipos de percepciones y acciones, que pueden ser obtenidas y producidas, respectivamente, por sensores físicos y sensores mecánicos en máquinas, pulsos eléctricos u ópticos en computadoras, tanto como por entradas y salidas de bits de un software y su entorno software.
Varios ejemplos se encuentran en el área de control de sistemas, planificación automática, la habilidad de responder a diagnósticos y a consultas de los consumidores, reconocimiento de escritura, reconocimiento del habla y reconocimiento de patrones. Los sistemas de IA actualmente son parte de la rutina en campos como economía, medicina, ingeniería y la milicia, y se ha usado en gran variedad de aplicaciones de software, juegos de estrategia, como ajedrez de computador, y otros videojuegos.


Robotica
Tres leyes de la robotica
En ciencia ficción las tres leyes de la robotica son un conjunto de normas escritas por Isaac Asimov, que la mayoría de los robots de sus novelas y cuentos están diseñados para cumplir. En ese universo, las leyes son "formulaciones matemáticas impresas en los senderos positrónicos del cerebro" de los robots (líneas de código del programa que regula el cumplimiento de las leyes guardado en la memoria Flash EEPROM principal del mismo). Aparecidas por primera vez en el relato Runaround (1942), establecen lo siguiente:
- Un robot no hará daño a un ser humano o, por inacción, permitir que un ser humano sufra daño.
- Un robot debe obedecer las órdenes dadas por los seres humanos, excepto si estas órdenes entrasen en conflicto con la 1ª Ley.
- Un robot debe proteger su propia existencia en la medida en que esta protección no entre en conflicto con la 1ª o la 2ª Ley.1
Esta redacción de las leyes es la forma convencional en la que los humanos de las historias las enuncian; su forma real sería la de una serie de instrucciones equivalentes y mucho más complejas en el cerebro del robot.
Asimov atribuye las tres Leyes a John W. Campbell, que las habría redactado durante una conversación sostenida el 23 de diciembre de 1940. Sin embargo, Campbell sostiene que Asimov ya las tenía pensadas, y que simplemente las expresaron entre los dos de una manera más formal.
Las tres leyes aparecen en un gran número de historias de Asimov, ya que aparecen en toda su serie de los robots, así como en varias historias relacionadas, y la serie de novelas protagonizadas por Lucky Starr. También han sido utilizadas por otros autores cuando han trabajado en el universo de ficción de Asimov, y son frecuentes las referencias a ellas en otras obras, tanto de ciencia ficción como de otros géneros

Suscribirse a:
Entradas (Atom)